
Autonomous vehicles are today equipped with improved sensors and artificial intelligence to make decisions. Nevertheless, these have limitations, such as needing line-of-sight to the sensed object. Cellular V2X (C-V2X) can overcome these, enabling enhanced cooperation among road users and infrastructure. To effectively test C-V2X integration in the lab, virtual testing is needed to conduct the large number of necessary analyses.
Autonomous and cooperative driving
In-vehicle systems facilitate local sensing and decision making, using data sensed about nearby objects. This is limited by sensor range, obstacles, poor weather or unknown intentions of other drivers.
Integrating C-V2X will encourage more cooperative driving. The first phase uses information from external sources, that is not critical for decision making. Further improvements could be sharing information with both vehicles and cloud-based services. Examples are local hazards, weather and traffic conditions.
C-V2X technology
C-V2X in both direct and network-based modes provides communication for automotive applications and connects vehicles and pedestrians with smart transportation infrastructure. LTE V2X interfaces enable basic/enhanced safety features at high speeds and densities while providing high throughput, high reliability, low latency and position sharing. 5G NR V2X also supports advanced safety features. 5G NR radio will improve performance to offer complex map updates and shared sensor information, ultra-low latency with multi-access edge computing, ultra reliability for safety-critical applications and precise positioning.
Several regional C-V2X standards defining use cases have emerged, for example:
– EU – ETSI EN302 637-2 CAM; ETSI EN302-637-3 DENM
– US – SAE J2945/1 MAR2016
– China – T/CSAE 53-2020
Although similar, there are differences, with some use cases having no equivalents.
Similarly, regional standards also define message formats:
– EU – ETSI TS 302 637-2 V1.3.2 (CAM) / ETSI TS 302 637-3 V1.2.2 (DENM)
– US – SAEJ2735-201603
– China – YD/T 3709-2020
To provide situational data to vehicles, the Basic Safety Message (BSM) Part I or Cooperative Awareness Message (CAM) is used.
C-V2X benefits and use cases
By sharing raw sensor data, extending sensor range, or clarifying vehicles’ intentions, C-V2X can alleviate the shortcomings of local sensing and decision making, while aiding cooperative automated driving.
Benefits of C-V2X are increased traffic safety, reduced travel time, increased traffic service level,
reduced fuel consumption and carbon emissions, improved range and reduced cost of perception.
If we examine two use cases, one simple and one with a high level of cooperation, we can look at the message type exchanged, how much emphasis the vehicle should give to the information provided via C-V2X, and which entities exchange information. A roadside unit (RSU) is a roadside V2X transceiver, connecting users to the traffic management infrastructure. An onboard unit (OBU) is a V2X transceiver, mounted in a vehicle or carried by pedestrians.
Intersection collision warning (ICW)
With ICW, information exchange is only informative, warning of vehicles approaching the intersection. This increases awareness beyond sensor range or behind obstacles.
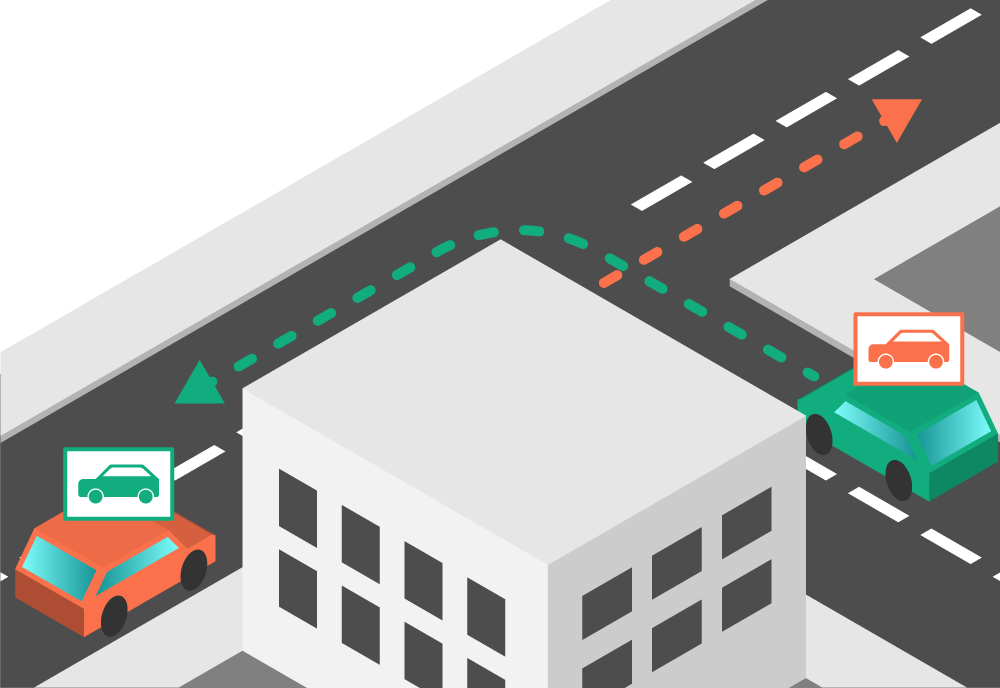
Messages used are CAM, or BSM Part I. These are broadcast to nearby nodes and contain identifier, type of ITS station, reference position, heading, speed, etc. Recipients need to evaluate the information’s relevance.
Dynamic intersection management (DIM)
DIM involves several types of participants and messages. The intersection manager understands the crossing geometry, processes inputs from sensors and can alter traffic signaling. C-V2X is crucial for the safe coexistence of all participants.
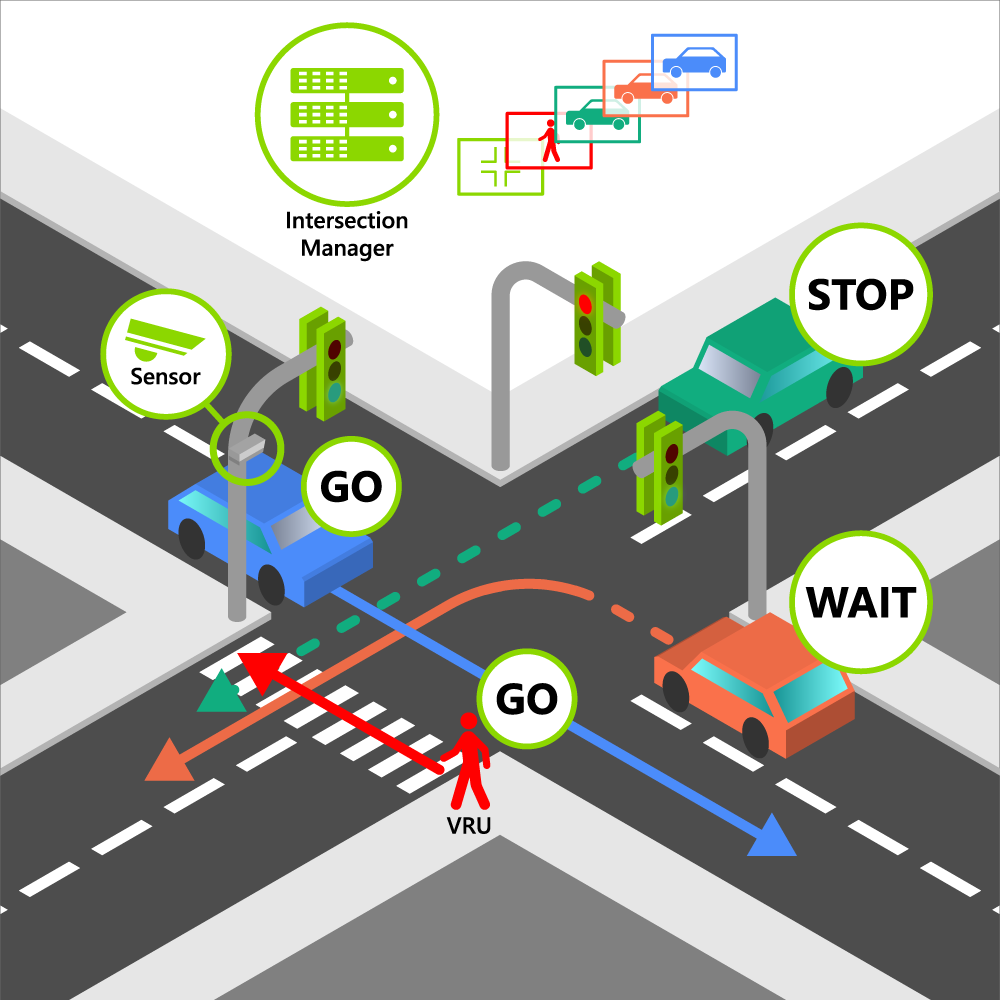
Message types used are BSM, CAM, DENM, traveller information message (TIM), signal phase and timing (SPaT)/map data (MAP) and personal safety message (PSM). TIM are broadcast by stationary RSUs about roadways. SPaT are broadcast by RSUs and provide status of signals and when they should change. MAP are broadcast by RSUs to provide the layout of an intersection. PSM are broadcast by vulnerable road user devices to announce their presence to approaching vehicles. For sensor sharing and low latency management, 5G NR-based V2X functionality is needed.
Vehicle simulation testing
C-V2X functionality can be simulated, allowing different scenarios to be tested and the reactions of the telematics control unit (TCU) to be observed.
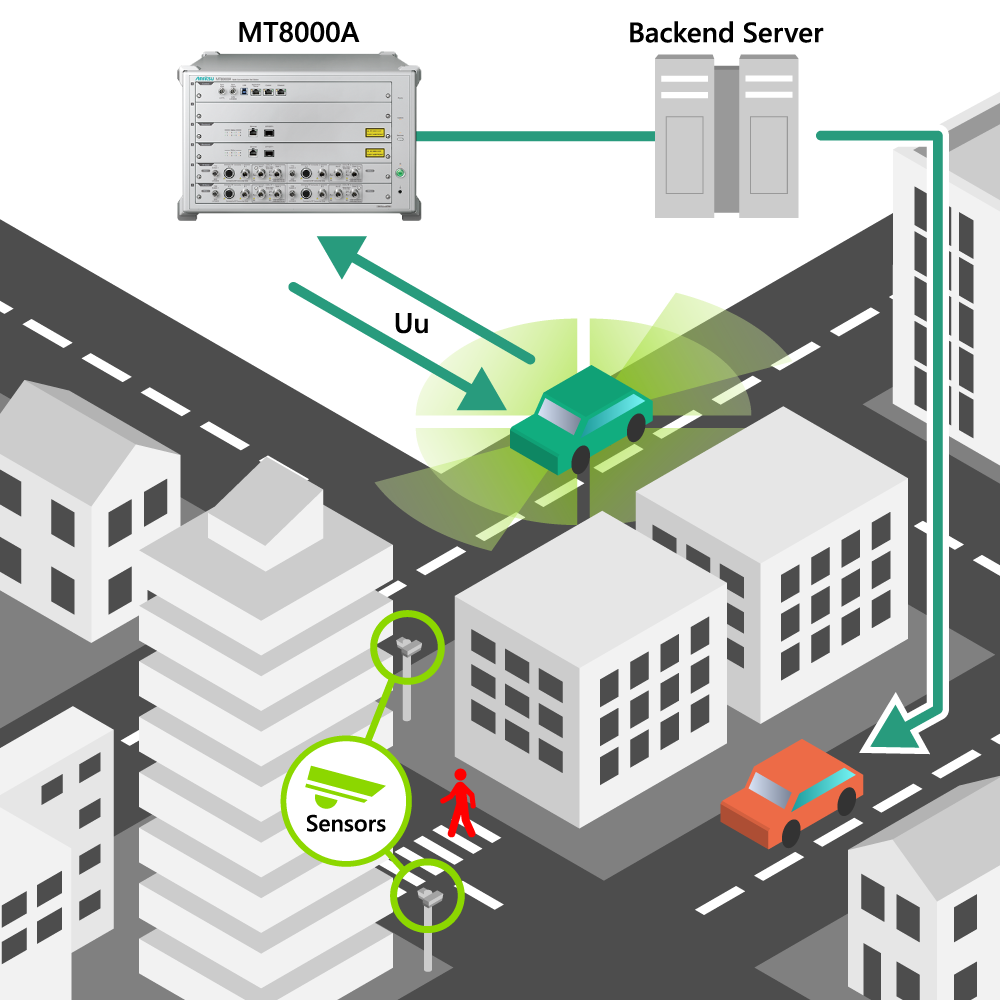
Hardware-in-the-loop can be used to simulate a TCU’s interaction with a virtual environment, with in-vehicle systems, sensors and environmental information, and applications running on back-end servers. The TCU is normally connected to other simulated control units via the vehicle’s communication bus and to a base station and back-end server via a wireless link. A HIL setup can help validate V2I applications on the TCU during the virtual test drive using various throughput and latency conditions, made possible by the realistic cellular test network.
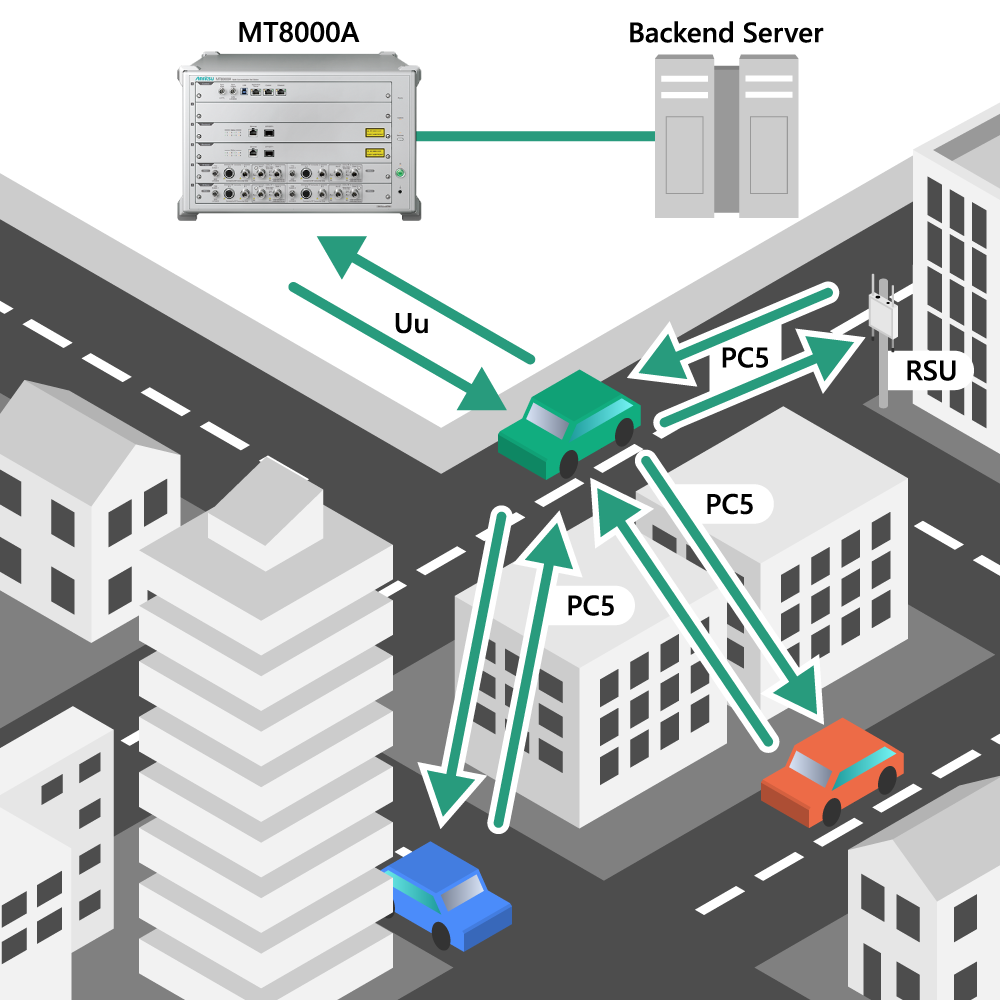
C-V2X functional test
This simulates messages between a TCU and other devices. The live simulation enables observation of the triggered and exchanged C-V2X messages, as the vehicle drives virtual roads. Information sent depends on the location and actions of other road users. The TCU communicates with other V2X devices using the PC5 interface and with the V2N telematics services via simulated cellular link.
Test solution: MT8000A
The Anritsu MT8000A is a 5G NR system simulator supporting radio frequency, protocol and functional testing. It supports frequencies from under 6GHz to 43GHz (millimeter wave), with broadband signal processing and beamforming technology.
Throughput, latency, or retransmissions can be evaluated under different PHY/MAC/RLC layer configurations. Its software defined architecture means it can be expanded to accommodate future technologies. It can be easily automated, enabling smooth integration with other components.
C-V2X helps improve transport safety and efficiency. There are use cases for many real-life situations, with scenarios for testing C-V2X in sensing and decision making. As C-V2X becomes 5G NR V2X, it will enable advanced use cases and cooperative autonomous driving. These can be tested in simulated environments, such as HIL and C-V2X functional test systems.